Produk




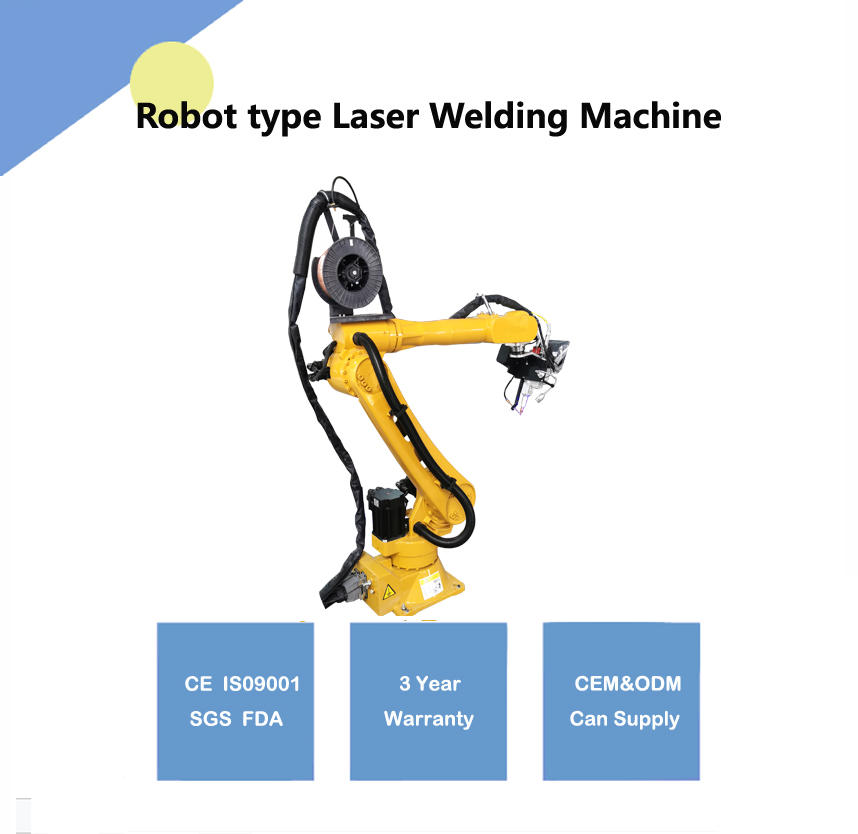
Robot tipe laser sweismasjien
Produkvertoning
Tegniese parameter
| Ses-As Robot | Tuling | Kernkomponente | Laserbron |
| Gebruik | Lasmetaal | Maks. Uitsetkrag | 2000W |
| Toepaslike Materiaal | Metaal | CNC Of Nie | Ja |
| Verkoelingsmodus | Waterverkoeling | Elektriese en pneumatiese stelsels | Schneider |
| Golflengte | 1090 Nm | Laserkrag | 1000w/ 1500w/ 2000w |
| Gewig (kg) | 600 kg | Sertifisering | Ce, ISO9001 |
| Kernkomponente | Veselaserbron, Vesel, Handvatsellaser-sweiskop | Belangrike verkooppunte | Hoë akkuraatheid |
| Funksie | Metaalonderdeel lasersweising | Vesellengte | ≥10m |
| Toepaslike Nywerhede | Hotelle, Klerewinkels, Boumateriaalwinkels | Kernkomponente | Laserbron |
| Wyse van werking | Gepulseerd | Na-waarborgdiens | Aanlyn Ondersteuning |
| Brandpuntdiameter | 50μm | Maksimum Dekking | 1730mm |
| Video Uitgaande Inspeksie | Verskaf | Grafiese formaat ondersteun | KI, PLT, DXF, DWG, DXP |
| Plek van oorsprong | Jinan, Shandong-provinsie | Waarborgtyd | 3 Jaar |
Robotarm
Die robotas kan 'n roterende as of 'n translasie-as wees, en die werking van die as word bepaal deur die meganiese struktuur. Die robotas word verdeel in die bewegingsas van die robotliggaam en die eksterne as. Die eksterne as word verdeel in 'n skuiftafel en 'n posisioneerder. Tensy anders vermeld, verwys die robotas na die bewegingsas van die robotliggaam.
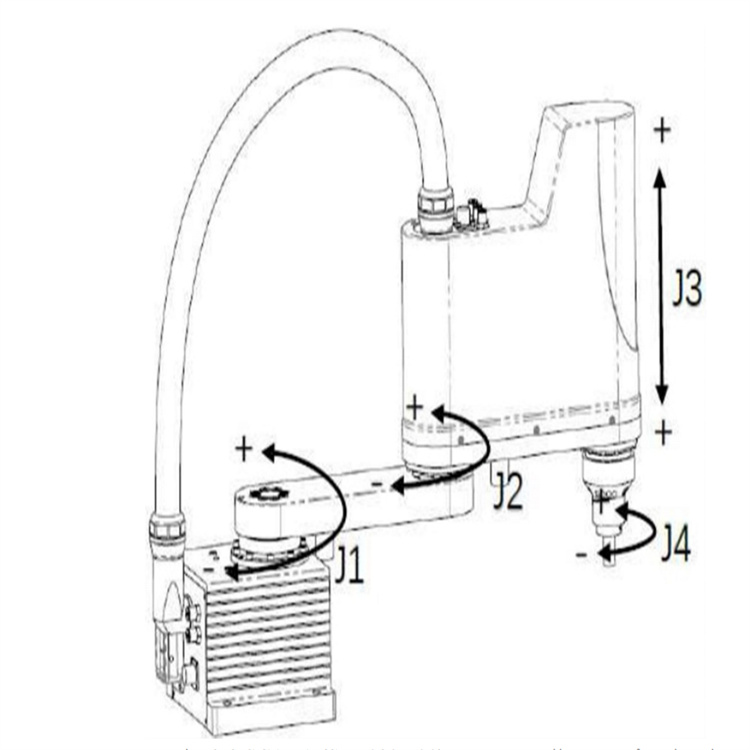
Turing-robotte word in drie tipes industriële robotte verdeel:
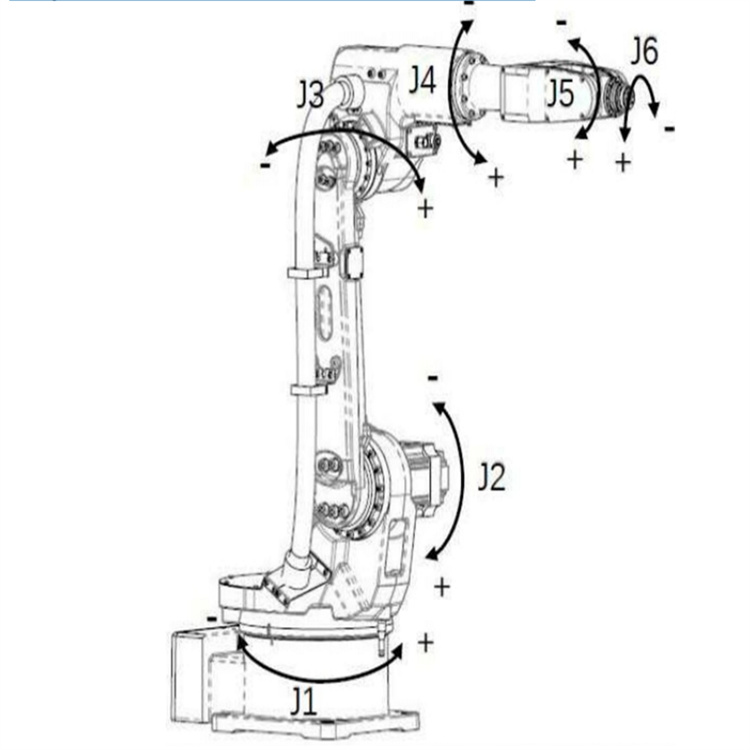
Industriële ses-as robot: insluitend ses rotasie-asse
SCARA: bevat drie rotasie-asse en een translasie-as
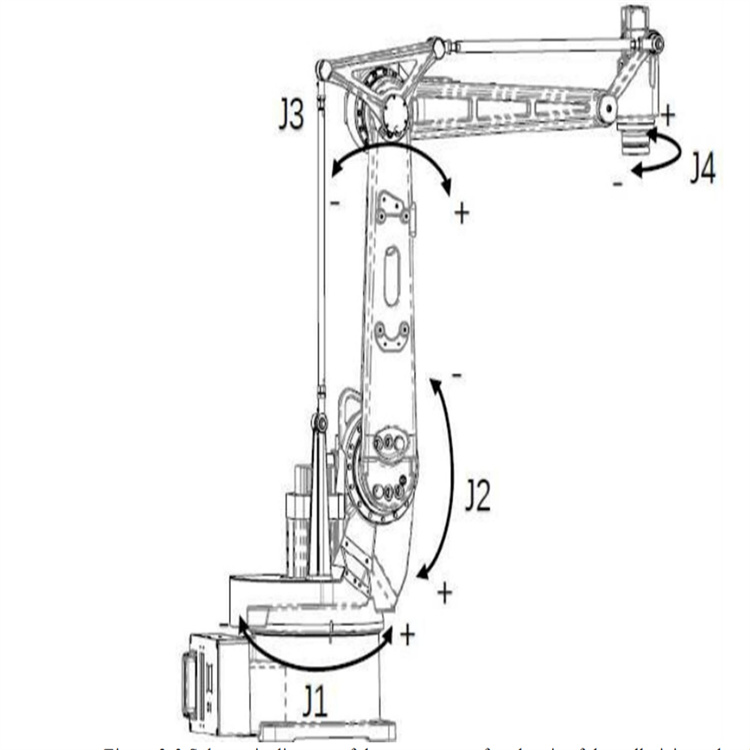
Palletiseermanipulator: insluitend vier roterende skagte Die gesamentlike beweging van die robot word in die figuur getoon.
Toepassing van robotsweismasjien
1. Masjinerievervaardigingsveld
Met die intensivering van sweiswerk in die masjinerievervaardigingsbedryf, het die sweisoperasie inherent swak werksomstandighede en groot hittestraling, wat 'n hoogs gevaarlike beroep is. Daar is ook baie grootskaalse toerusting in masjinerievervaardiging, wat ook die moeilikheidsgraad van sweiswerk verhoog. , 'n Sweisrobot is 'n outomatiese meganiese toerusting wat betrokke is by sweiswerk, wat die arbeidsintensiteit van werkers bevry en help om die vlak van outomatisering in die veld van masjinerievervaardiging te verbeter.
2. Motorvoertuie en motoronderdele:
In onlangse jare het die motorbedryf, om aan die behoeftes van die publiek te voldoen, gediversifiseerde ontwikkeling getoon. Tradisionele sweiswerk kan nie aan die hoë sweisvereistes van motor- en motoronderdelevervaardiging voldoen nie. Die sweisnaad is mooi en ferm. In baie moderne motorproduksiewerkswinkels is sweisrobot-monteerlyne gevorm.
3. Elektroniese toerusting:
Die veld van elektroniese toerusting het relatief hoë vereistes vir sweisgehalte. Met die toenemende vraag na elektroniese toerusting in die samelewing, staar elektroniese toerusting ook ernstige uitdagings in die gesig terwyl dit vinnig ontwikkel. Sweisrobotte kan sweisgehalte stabiliseer terwyl produksiedoeltreffendheid verseker word. Die presiese sweiswerk van die toerusting is drie tot vier keer hoër as dié van handearbeid.
4. Lugvaart:
In die struktuur van die vliegtuig is daar byna 1 000 sweiskomponente van die bakwerk, en byna 10 000 onderdele is betrokke. Die meeste van die belangrike lasdraende komponente van die vliegtuig gebruik gesweisde komponente. Die vliegtuigbakwerk is onder groot druk tydens vlug, dus is die sweisvereistes relatief streng, en die sweisrobot kan die sweisparameters buigsaam instel deur die outomatiese sweisnaadopsporingstegnologie om die vliegtuigstruktuur akkuraat te sweis.
Onderhoud van masjien
- Draadtoevoermeganisme. Insluitend of die draadtoevoerafstand normaal is, of die draadtoevoerleiding beskadig is, en of daar 'n abnormale alarm is; Of die gasvloei normaal is; Of die sweislasbrander se veiligheidsbeskermingstelsel normaal is. (Dit is verbode om die sweislasbrander toe te maak vir veiligheidsbeskermingswerk); Of die watersirkulasiestelsel normaal werk; Toets TCP (dit word aanbeveel om 'n toetsprogram saam te stel en dit na elke skof uit te voer)
2. Weeklikse inspeksie en onderhoud
1. Skrop elke as van die robot; Kontroleer die akkuraatheid van die TCP; Kontroleer die oorblywende olievlak. ;Kontroleer of die nulposisie van elke as van die robot akkuraat is; Maak die filter agter die watertenk van die sweismasjien skoon.; Maak die filter by die saamgeperste luginlaat skoon; Maak die onsuiwerhede by die spuitstuk van die sweisbrander skoon om verstopping van die watersirkulasie te voorkom; Maak die draadtoevoermeganisme skoon, insluitend die draadtoevoerwiel, draaddrukwiel en draadgeleierbuis; Kontroleer of die slangbundel en geleidingsdraadslang beskadig of gebreek is. (Dit word aanbeveel om die hele slangbundel te verwyder en dit met saamgeperste lug skoon te maak); Kontroleer of die sweisbrander se veiligheidsbeskermingstelsel normaal is en of die eksterne noodstopknoppie normaal is.